



Un robot mobile compagnon attentif aux personnes en situation de fragilité
La plateforme ATTENTIVE est dédié au développement d’algorithmes de perception et de navigation pour des robots mobile compagnon. Les objectifs recherchés sont permettre à un robot de se déplacer en milieu humain à la recherche d’une personne en situation de fragilité pour s'assurer de sa bonne condition apparente.
Pour arriver à cet objectif, le robot doit être capable :
• De percevoir son environnement, en particulier les personnes présentes autour du robot
• De focaliser son attention en se déplaçant
• De naviguer dans des environnements dynamiques
Moyens :
La plateforme est composée principalement du robot « Jimbot » réalisée au fablab MSTIC de l’université Grenoble Alpes, sur la base de la plateforme RobAir.
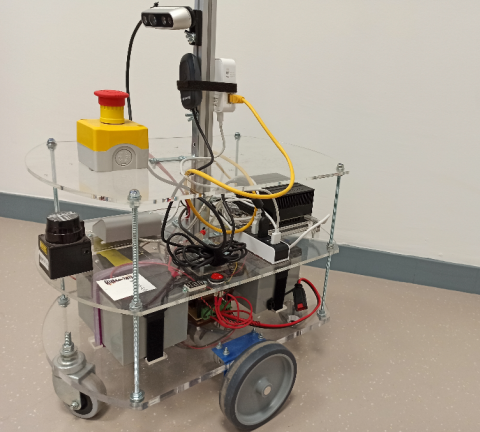
Le robot est composée d’une base mobile différentielle, d’un télémètre laser Hokuyo URG-04LX, une caméra RGB-D Intel Realsense D435, une manette sans fil et un PC embarqué Nvidia Jetson AGX-Xavier.
Des caméras RGD-B de type Intel Realsense D435 ou Asus Xtion sont également disponibles pour travailler sur les algorithmes de vision indépendamment du robot.
Travaux de recherche
Modélisation de l'environnement :
- Supersurfel fusion
- Détection, suivi et ré-identification de personnes