2. System Description
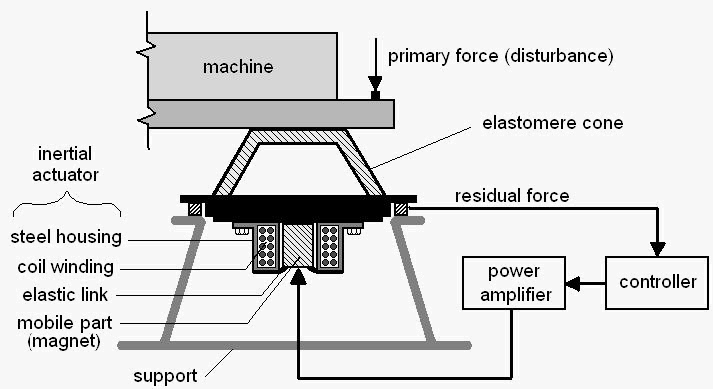
An active suspension system is used for attenuation of unknown/time varying narrow band disturbances. The figure above shows the scheme of the active suspension. The main parts of the active suspension are:
- an elastomer cone (passive suspension)
- an inertial actuator
- a measure of the residual force
- a power amplifier
- a controller (computer generated control signal)
- a shaker which generates the disturbances
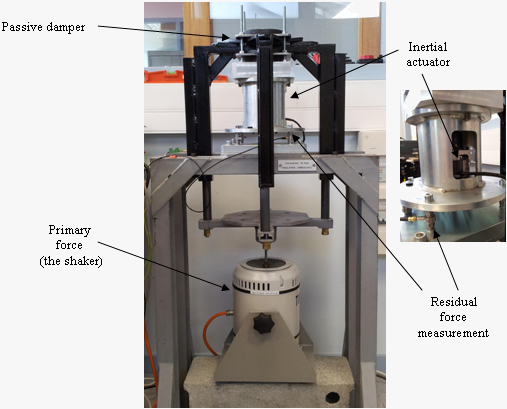
The mechanical construction of the load is such that the vibrations produced by the shaker, fixed to the ground, are transmitted to the upper side of the active suspension.
The output of the system is the measured voltage corresponding to the residual force. The control input drives the inertial actuator through a power amplifier. The transfer function between the excitation of the shaker and the residual force is called the primary path. The secondary path is defined as the transfer function between the control input and the residual force.
Both the primary path and the secondary path are characterized by the presence of a double differentiator (since the input in the actuator is proportional to a position and the output is proportional with the acceleration).
These transfer functions have to be identified from input/output data provided (additional input/output data can be provided on demand). The sampling frequency is 800 Hz.
Under appropriate control the inertial actuator will provide the forces for the compensation of the mechanical disturbances, therefore leading to the absorption of the vibrations.
The control objective is to reject the effect of unknown narrow band disturbances on the output of the system (residual force), i.e. to attenuate the vibrations transmitted from the machine (the mechanical structure fixed on the active suspension and excited by the shaker) to the support via the active suspension.
A discrete time Matlab Simulink simulator of the plant can be downloaded (see section Simulator).
The output of the system is the measured voltage corresponding to the residual force. The control input drives the inertial actuator through a power amplifier. The transfer function between the excitation of the shaker and the residual force is called the primary path. The secondary path is defined as the transfer function between the control input and the residual force.
Both the primary path and the secondary path are characterized by the presence of a double differentiator (since the input in the actuator is proportional to a position and the output is proportional with the acceleration).
These transfer functions have to be identified from input/output data provided (additional input/output data can be provided on demand). The sampling frequency is 800 Hz.
Under appropriate control the inertial actuator will provide the forces for the compensation of the mechanical disturbances, therefore leading to the absorption of the vibrations.
The control objective is to reject the effect of unknown narrow band disturbances on the output of the system (residual force), i.e. to attenuate the vibrations transmitted from the machine (the mechanical structure fixed on the active suspension and excited by the shaker) to the support via the active suspension.
A discrete time Matlab Simulink simulator of the plant can be downloaded (see section Simulator).