





La plateforme de robotique aérienne regroupe les moyens techniques du Gipsa-lab pour la conception, la fabrication et l'étude des robots volants.
Elle est exploitée principalement par l'équipe COPERNIC.
Elle comprend les éléments suivants :
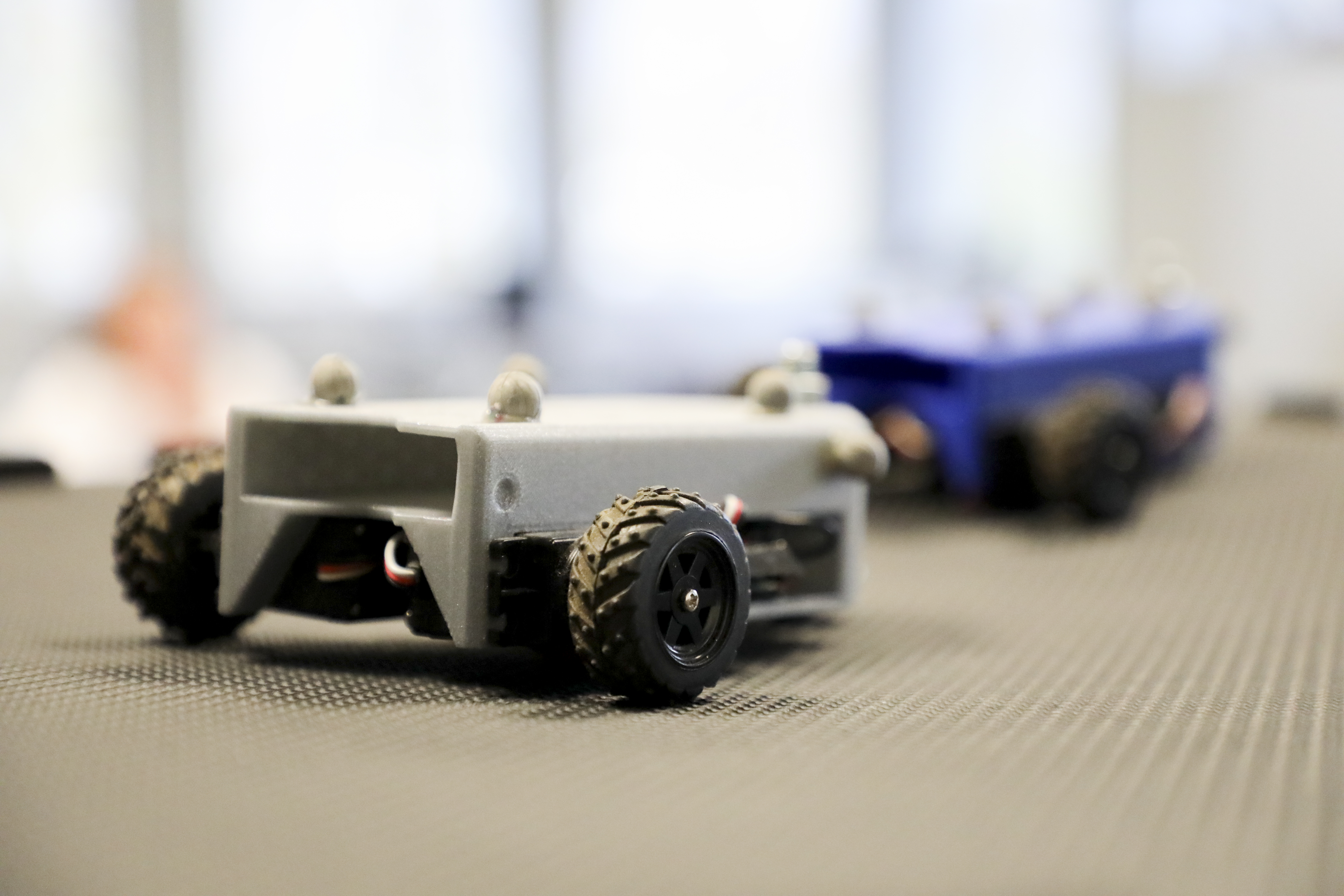
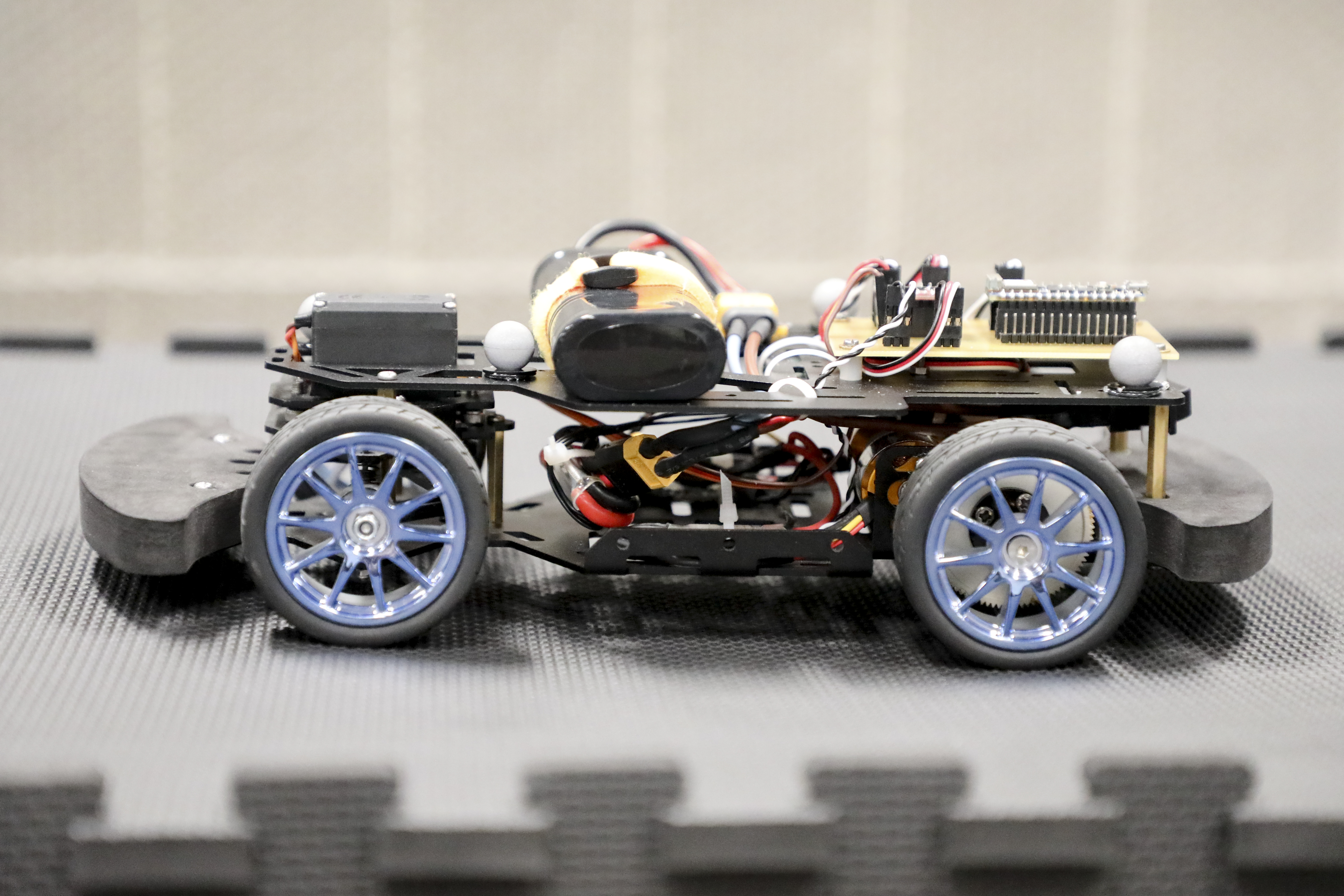
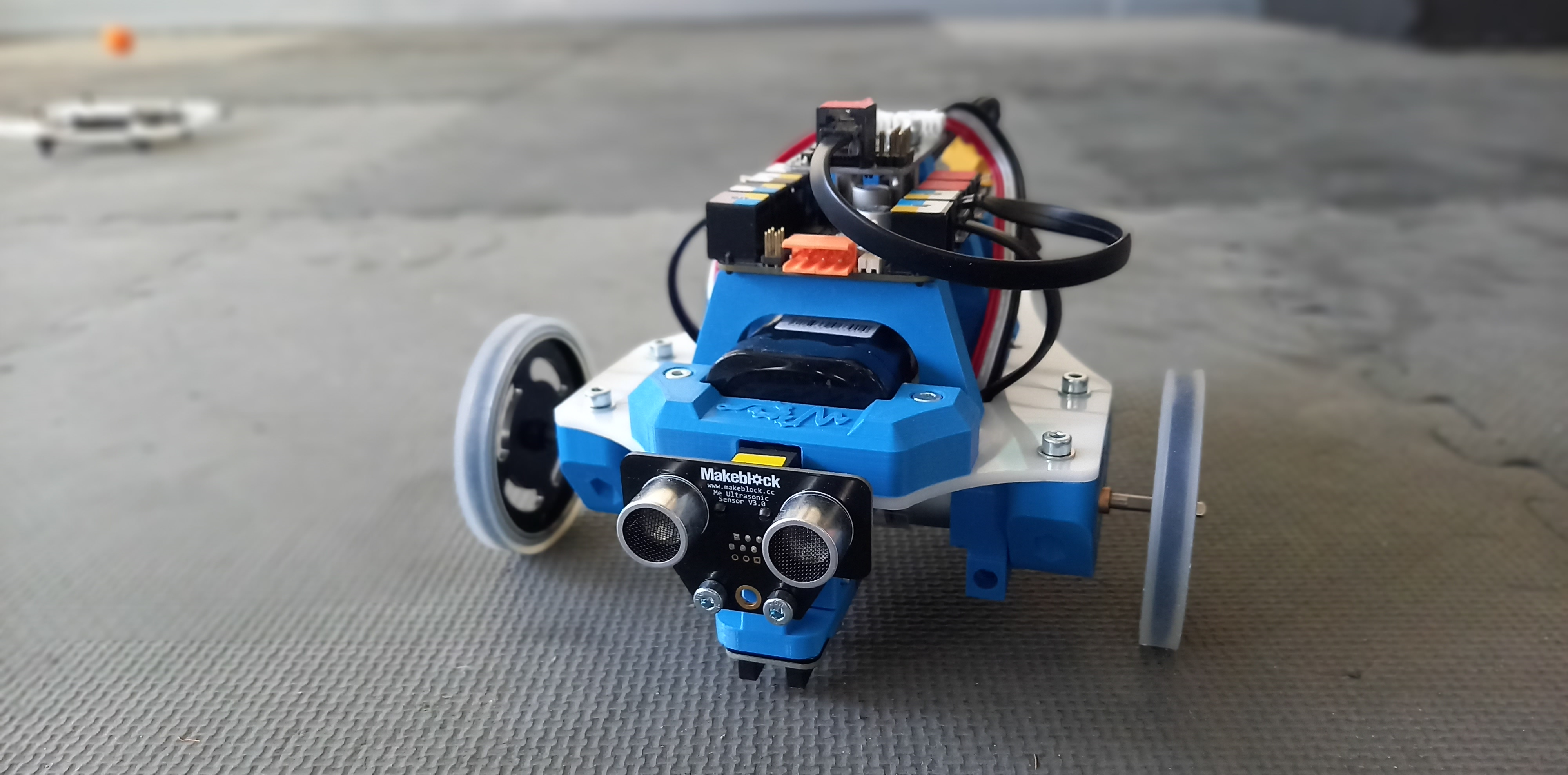
Prototypage de robots mobiles
Nous développons de nombreux robots volants sur mesure pour répondre aux différents besoins liés aux projets de recherche réalisés au Gipsa-lab, de quelques grammes et jusqu’à 2 kg. En plus des travaux sur les multicoptères classiques que nous avons équipés de roues ou d’un bras articulé, nous avons développé des modèles de robots à aile battantes, ainsi que des cerfs-volants robotisés, tractés grâce à un treuil instrumenté au niveau du sol. Une passerelle de communication a également été développée pour pouvoir envoyer des messages aux standards de l’aéromodélisme (DSM, FrSky,…) et ainsi commander les drones et récepteurs commerciaux. Ces prototypes sont développés conjointement avec le service de prototypage mécatronique et le service logiciels du laboratoire qui assure tout ou partie de la conception mécanique et électronique.
|
Image

|
Image

|
Image

|
|
Image
|
Image
|
Image
|
Logiciels embarqués
Afin d'implanter les systèmes de perception et de contrôle sur les robots volants, nous développons nos propres logiciels embarqués sur les cartes contrôleur de vol ainsi que sur des PC embarqués telles que des cartes Nvidia Jetson ou raspberry pi. Le système mis en place permet également de contrôler les robots volant depuis un PC déporté relié au système de capture de mouvement.
L'architecture logicielle est basée sur l'intergiciel ROS (http://wiki.ros.org/) pour le PC embarqué ou déporté et le logiciel « PX4 » (https://px4.io/) pour le contrôleur de vol.
Des outils de simulations, basée sur Gazebo/ROS sont également disponibles pour tester les algorithmes de navigation. Un environnement complet de simulation pour l'évaluation et l'analyse comparative est disponible en open source sur github https://github.com/Gipsa-lab-PFP/BOARR.
MOCA: Volière intérieure pour drones
La volière mesure 8mx9m sur 2.9m de hauteur. Elle est équipée d’un système de capture de mouvement multi-caméras VICON qui reconstruit en temps réel la position et l’orientation des objets.

A cet outil est connecté un système de contrôle temps réel de robots volants basé soit sur Matlab/Simulink temps réel, soit sur ROS. Un deuxième système de capture de mouvement mobile, composé de 12 caméras Optitrack/Flex13, permet d’équiper facilement et de manière temporaire d’autres espaces (soufflerie, couloirs, …)
Système de capture de mouvement Vicon
Les caméras reconstruisent la position des objets grâce à des marqueurs passifs qui reflechissent la lumière (proche infra-rouge) envoyée par les projecteurs.
Caractéristiques:
12 caméras T40s : capture marqueurs de Ø1,5mm à Ø14mm , 515i/s, 4Mpx
L'espace de capture mesure 8mx9m sur 2.9m de hauteur.
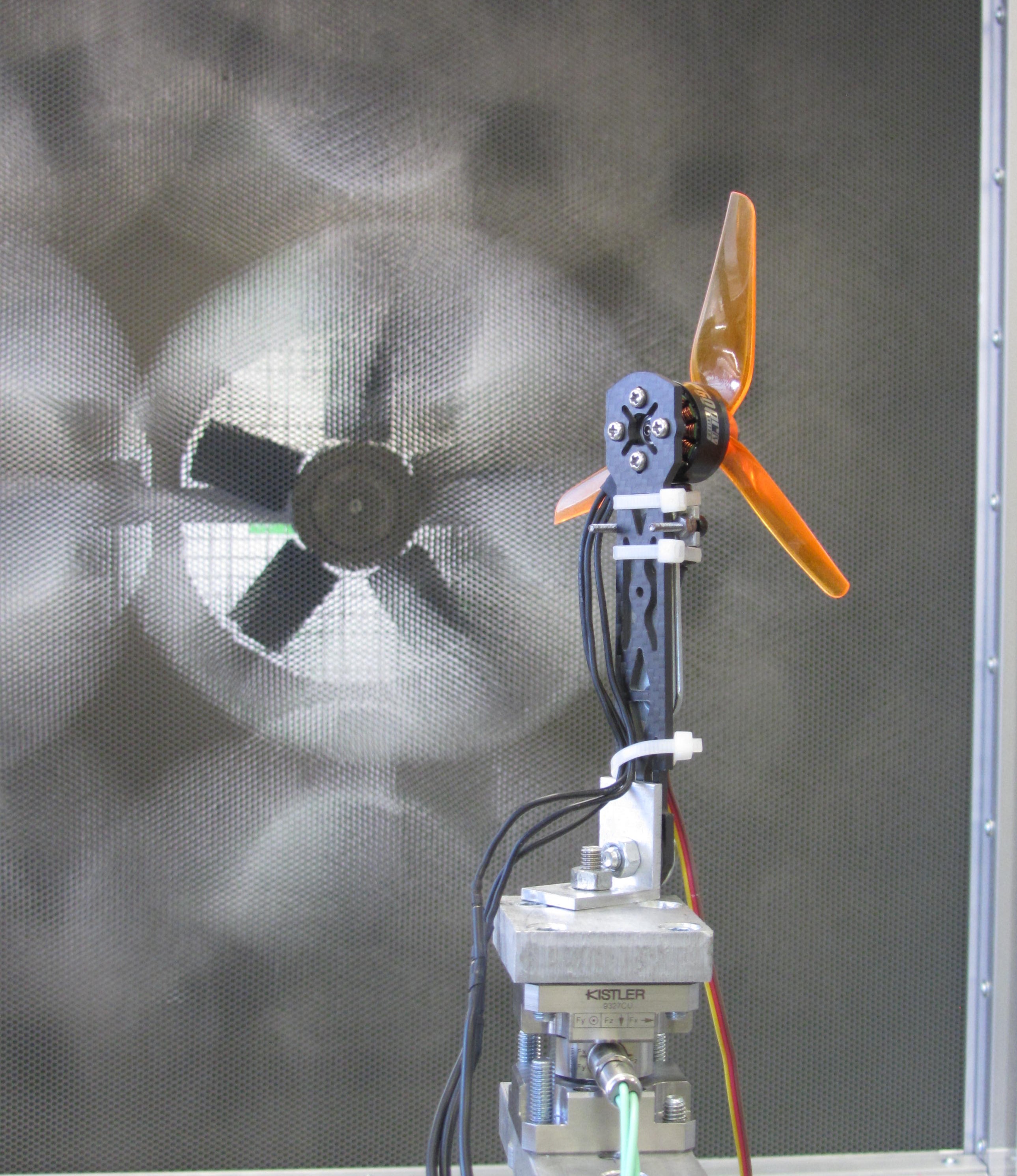
Souffleries
Deux souffleries de 3.6kW développées au Gipsa-lab permettent de générer jusqu’à 9m/s de vent sur une veine d’aire de 1mx1m. L'une est couplée a un banc de mesures (vitesses, forces, courant, tension...) et sert à l'étude de phénomènes aérodynamiques pour l'éolien et les drones, l'autre est située dans la salle de vol et sert à tester des scénarios de vols linéaires ou vols en présence de perturbations aérologiques.
|
Image
|
Image

|
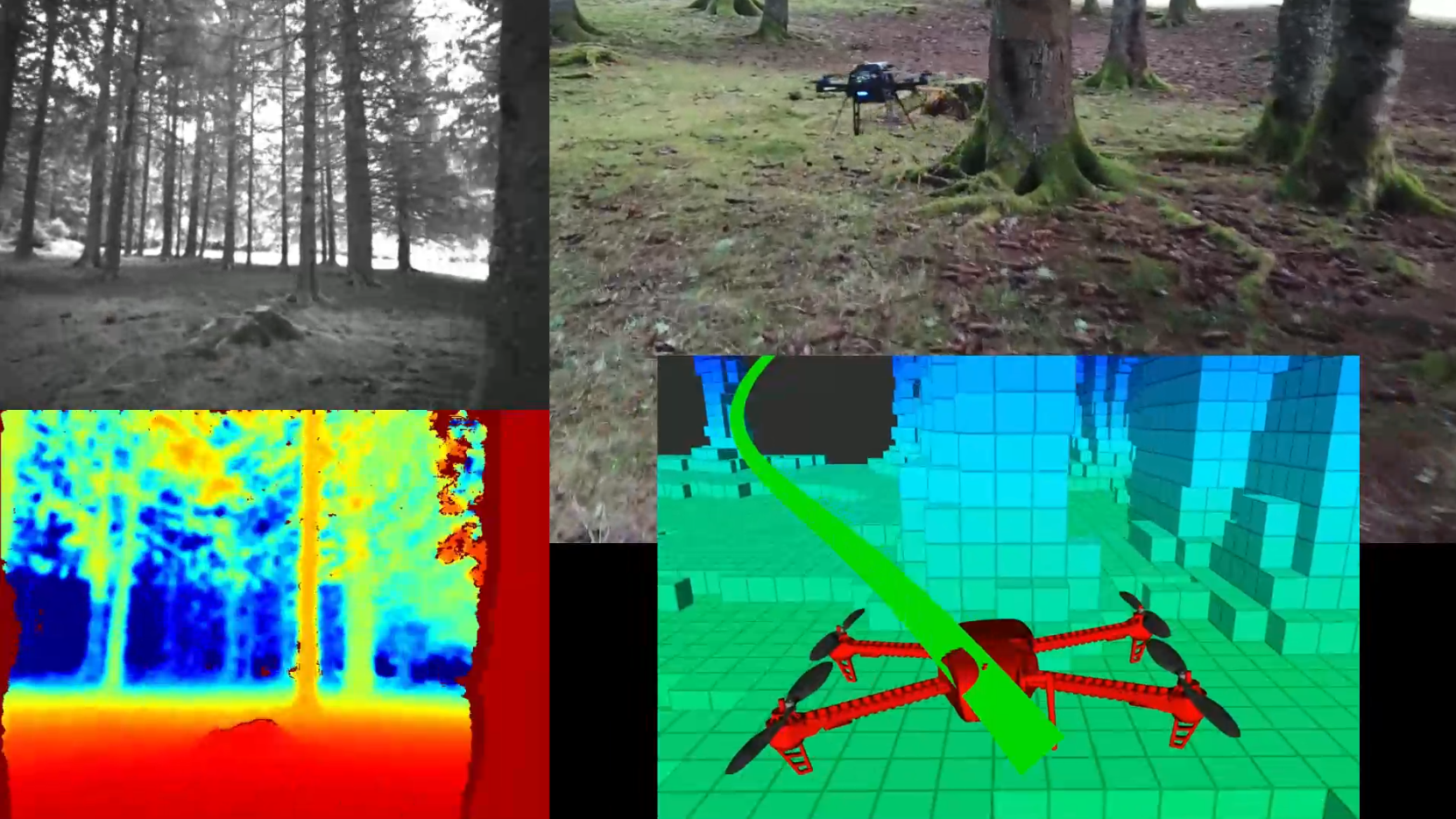
Moyens d’essais en extérieur
Les prototypes sont testés en conditions réels à l’extérieur grâce aux moyens et protocoles mis en place, avec la DGAC, le CNRS et certaines mairies. 3 personnes du laboratoire ont une licence de pilotage et sont habilités à télé-opérer des drones expérimentaux à l’extérieur.
|
Image

|
Image

|
Image

|
Financements
|
Image

|
Image

|
Image

|
Image

|
Image

|
Image
|
Tutelles : CNRS, UGA, Grenoble INP
Programmes investissements d'avenir : ROBOTEX ANR-10-EQPX-44-01 et TIRREX ANR-21-ESRE-0015
Quelques publications