

Robotme est un plateau technique d'enseignement et de recherche en robotique mobile, constitué de deux salles, bi-localisées au GIPSA-lab et à l'ENSE3-Grenoble INP.
Les 2 salles sont interopérables et sont équipées d'un système de capture de mouvement Qualisys (caméras M3) qui fournit la position et l'orientation 3D de plusieurs objets mobiles en temps réel.

Crédits photos © GIPSA-lab
Équipements et objectifs
La plateforme de robotique RBOTME est un espace mixte d’enseignement et de recherche dédié à l’expérimentation sur les robots mobiles aériens et terrestres. Elle intègre un ensemble d’équipements permettant le développement, la simulation et le contrôle temps réel de systèmes robotiques mobile aériens et terrestres.
La plateforme est dupliquée à Grenoble INP – Ense³, favorisant la mutualisation des ressources et dans une optique de mixité enseignement - recherche.
Elle est équipée d'un système de capture de mouvement pour la localisation précise et le suivi en temps réel des robots. Des stations de sol permettent la communication, la supervision et le contrôle déporté des robots.
La plateforme inclus également des simulateurs, ou jumeaux numériques offrant une reproduction fidèle du comportement des robots et de leur environnement pour la préparation et la validation des expérimentations, le développement algorithmique ou l'enseignement.
Les robots et leurs contrôleurs sont développés sous MATLAB/Simulink ou ROS/ROS2, assurant à la fois flexibilité et interopérabilité.
Pensée pour l’enseignent et pour la recherche, la plateforme permet d’évoluer en toute sécurité au milieu des robots, de mener des expérimentations multi-robots sur les essaims, la collaboration multi-agents, l’interaction humain-robot ou différentes activités pédagogiques en parallèle dans une arène expérimentale sécurisée.



Robotique aérienne
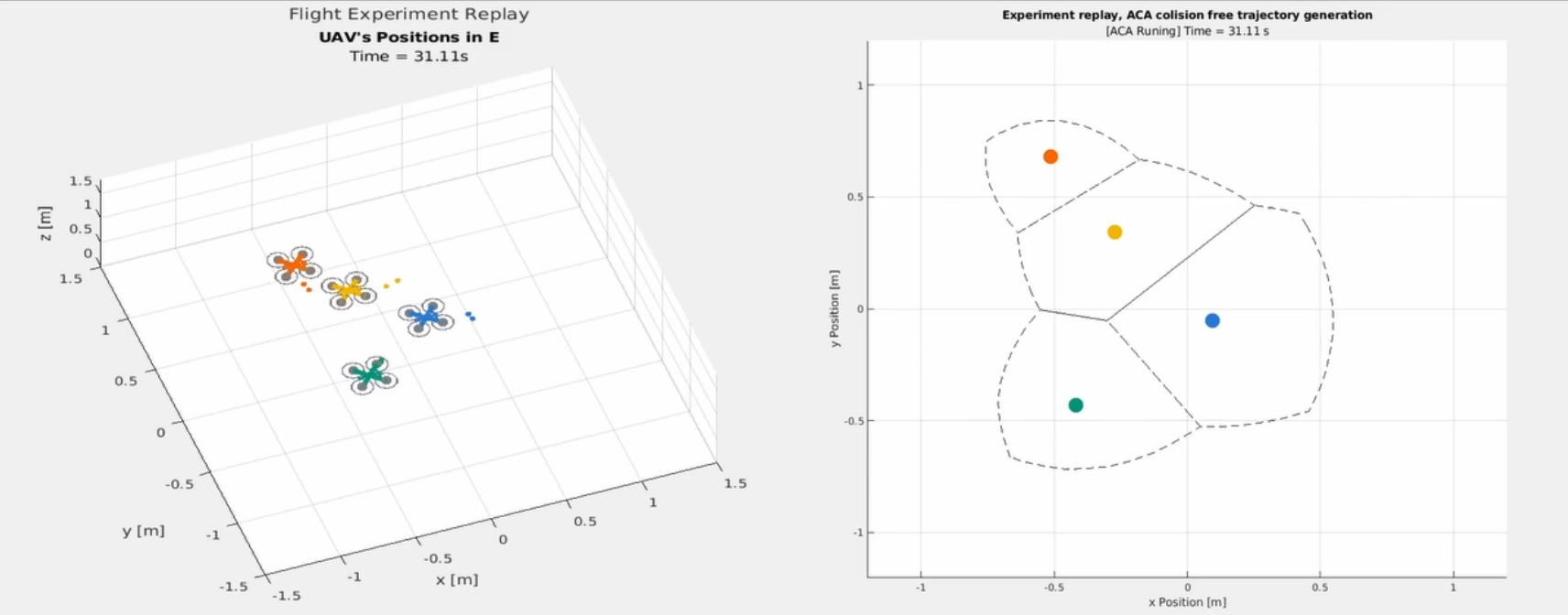
La plateforme peut accueillir jusqu’à huit mini-drones Parrot MAMBO modifiés pour le contrôle débarqué et le vol autonome dans un espace de vol sécurisé, adapté aux expérimentations collectives et collaboratives, ouvrant la porte à des travaux sur le vol en essaim et le contrôle de formation, la collaboration multi-agents (portage collaboratif de charge, etc.) ou bien même l’interaction humain-robots (co-manipulation, etc.).
La plateforme est également compatible avec les standards de l'architecture matérielle et logicielle du projet national d'équipement TIRREX, favorisant la reproductibilité et l’échange entre plateformes et les partenaires nationaux.

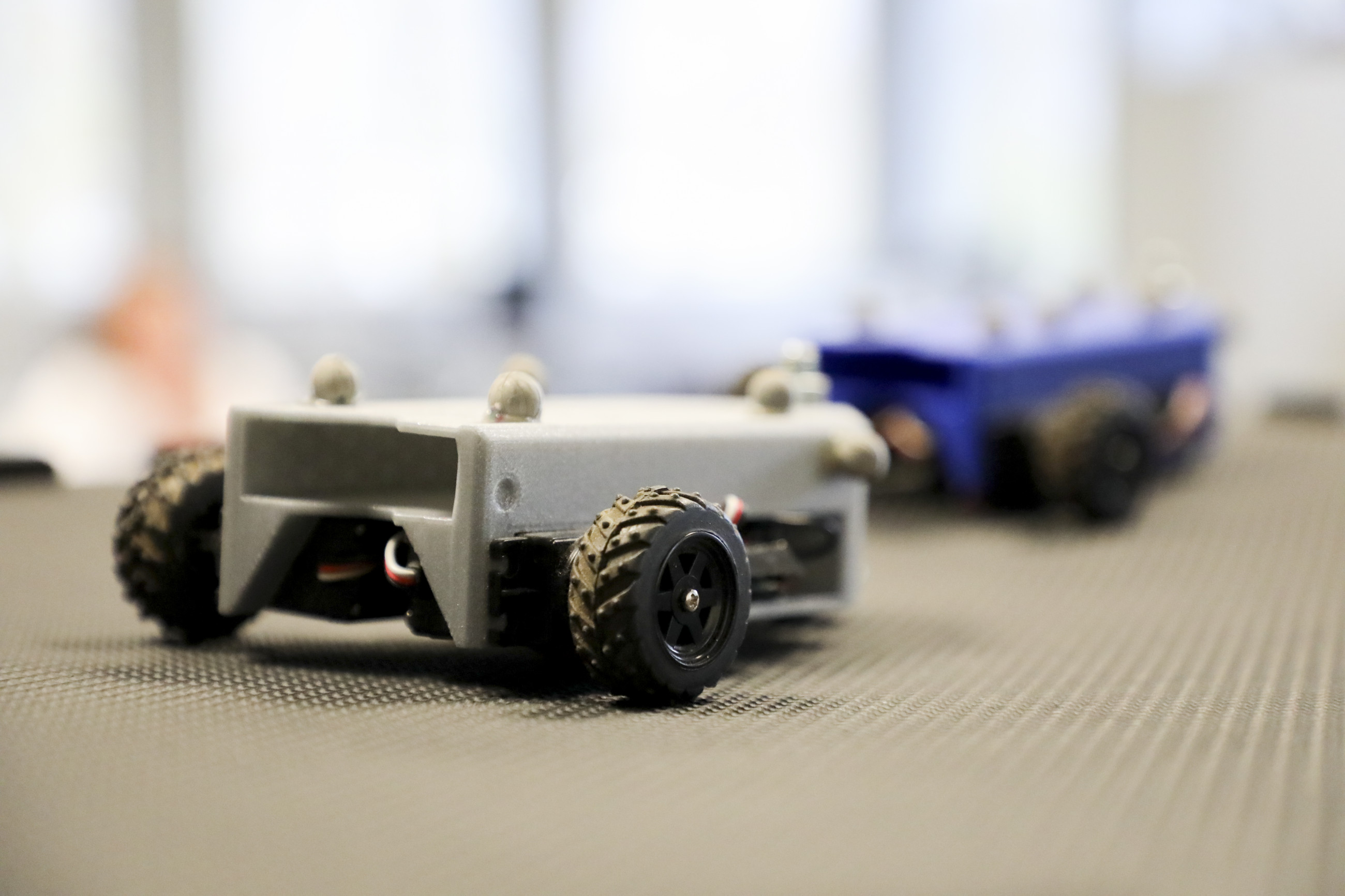
Robotique terrestre
Développée conjointement avec le plateau technique LIM, la partie terrestre permet l’expérimentation sur des modèles réduits de voitures autonomes pouvant évoluer sur différents revêtements, sur piste libre ou sur un circuit. Ces véhicules sont opérés dans des scénarios de contrôle de trafic, d'assistance à la conduite, de développement d'algorithmes de conduite autonome, ainsi que l'étude des interactions pneus - sol et l’étude de la performance des batteries.

L'interface MATLAB-Simulink permet une visualisation rapide, ergonomique et pédagogique des données capturées dans la salle.
Publications associées
Multi-UAV Distributed Control for Reconfigurable Formations,
Kostas Skantzikas, Lara Briñón-Arranz, Pierre Susbielle, Nicolas Marchand. Multi-UAV Distributed Control for Reconfigurable Formations. ICUAS 2024 - International Conference on Unmanned Aircraft Systems, ICUAS ’24, Jun 2024, Chania (Crète), Greece. pp.963-970. https://hal.science/hal-04608298v1
Communication-free Cooperative Transportation with Multiple UAVs,
Saleh Abuali, Kostas Skantzikas, Pierre Susbielle, Nicolas Marchand, Lara Briñón-Arranz. Communication-free Cooperative Transportation with Multiple UAVs. ROBOTICS 2025 - 14th IFAC Symposium on Robotics, Jul 2025, Paris, France. ⟨hal-05146755⟩ https://hal.science/hal-05146755v1


