
Visuel
GIPSA-lab accueille un nouveau robot pour l’étude de l’interaction face-à-face : Charlie
Communiqué
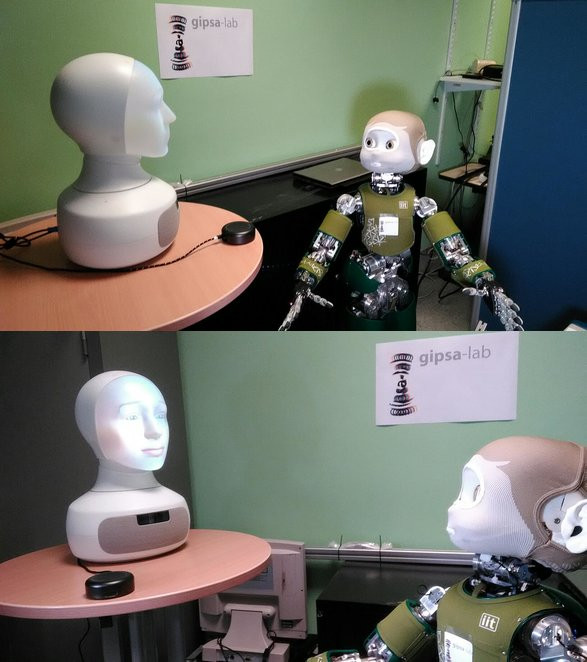
Nina et Charlie sont les deux robots humanoïdes de la plateforme Mical, dédiés à l’étude des interactions homme/robot. On cherche à faire d’eux des robots sociaux, capables de générer et décoder les signaux qui font une communication naturelle face à un ou plusieurs interlocuteurs humains : regards, tours de parole, synchronisation avec les gestes de pointage, signaux de feedback...
Nina est un robot humanoïde complet (tête, buste, bras et jambes) qui permet d’acquérir des données d’interaction homme/robot via la téléopération immersive. Ces données sont ensuite utilisées pour créer des modèles d’interaction et faire agir et réagir le robot de façon autonome : qui regarder, comment gérer les tours de parole, montrer des objets... pour réaliser une tâche commune avec un partenaire humain.
Charlie est un robot de type Furhat, une tête robotisée. Il est facile à transporter, y compris hors du laboratoire, et va permettre de tester plus facilement les modèles d’interaction dérivés des données acquises via la téléopération immersive du robot Nina. Basé sur un écran motorisé en forme de visage, il sait détecter ses partenaires de dialogue (via leur visages ou la direction de la voix) pour s’orienter vers eux, afficher des expressions et synthétiser/reconnaître de nombreuses langues, dont le français et l’anglais. La direction des yeux, l’articulation de sa bouche et de sa machoire sont projetés sur son écran semi-transparent depuis un vidéo-projecteur intégré à l'intérieur du dispositif, et donnent une bonne illusion de 3D.
Contacts : gerard.bailly@gipsa-lab.grenoble-inp.fr, frederic.elisei@gipsa-lab.grenoble-inp.fr
>> Plus d'infos