Description
Le problème traité dans cette plate-forme projet est le nanopositionnement ultra-rapide d'un objet miniaturisé pour la mesure ultra-fine, qui représente un défi théorique et applicatif en raison des caractéristiques particulières et du comportement dynamique de tels objets.
Plus particulièrement, le positionnement nanométrique suppose le développement d'un système original de mesure de la position et de son contrôle, qui soit très rapide (bande passante de quelques dizaines de kHz), très précis (Angström=1e-10m), et qui tienne compte des perturbations, non-linéarités et bruits importants pouvant affecter la position de l'objet miniaturisé. Le but du nanopositionnement lorsqu'il est utilisé en nanosciences, est de réaliser un système de mesure ultra-fine (rapports SNR très faibles) de forces, champs ou topographie au niveau atomique.
Il n'existe pas encore dans la littérature mondiale de résultat probant sur le contrôle à la fois très rapide (100 kHz) et très précis (Å) de système à l'échelle nanoscopique. Effectivement, les études existantes privilégient chacune un aspect du problème complexe issu du compromis rapidité/précision.
Compte tenu des résultats novateurs que l'équipe grenobloise de GIPSA-lab a déjà obtenus pour le positionnement contrôlé précis et rapide d'objets miniaturisés (micro-accéléromètre, micro-poutre d'AFM), le défi que ce projet veut relever est le positionnement dans l'espace d'un objet de taille réduite, avec une précision dynamique « ultime ». Dans le contexte local où les nanosciences représentent un axe majeur du pôle grenoblois, ce type de système de nanopositionnement trouvera son application en microscopie en champ proche, notamment par l'intermédiaire des collaborations déjà initiées avec les physiciens de l'I. Néel et du laboratoire LiPhy (PR. Antoine Delon) sur le microscope confocal équipé d'optique adaptative.
La plate-forme offre la possibilité de valider des aspects théoriques sur la commande à l'échelle nanoscopique. L'étude théorique vise la formalisation des problèmes critiques rencontrés lors du positionnement ultime des objets miniaturisés : prise en compte des différentes dynamiques et échelles (temps et dimension), des bruits, des non-linéarités. Ces problèmes qui habituellement sont traités par les spécialistes de la physique ou de la microélectronique, sont dans ce projet abordés par les méthodologies propres à l'automatique (modélisation dynamique interne, commande, observation, identification).
La mise en oeuvre d'une application illustrative de positionnement « ultime » contrôlé, met en évidence les problèmes traités et permet la validation des méthodes proposées théoriquement. Cette application sert de support au projet.
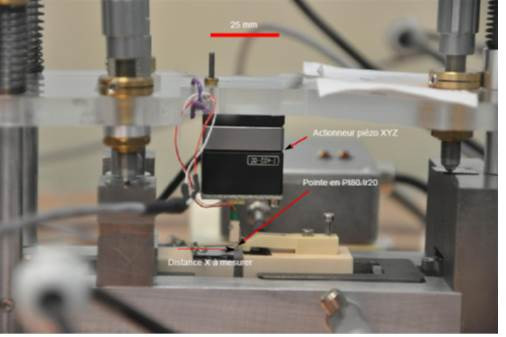
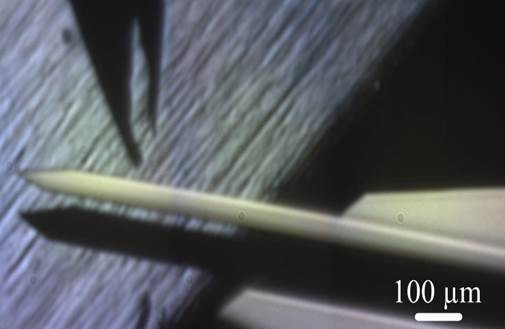
Nous utilisons à cette fin un système mis en œuvre à Gipsa-lab, inspiré des sondes utilisées en microscopie à champ proche. Il consiste en une mesure de position par courant tunnel contrôlé (type microscopie à courant tunnel) et en un contrôle précis de cette position par actionnement électrostatique, le système étant un microlevier utilisé habituellement en microscopie à force atomique, ayant un comportement fortement résonant. Ce type de système sert à mesurer des forces inter-atomiques (très faibles) ou des topographies d'échantillons miniatures (imagerie).
Quelques résultats
3 thèses soutenues (S. Blanvillain, I. Ahmad, L. Ryba) , 1 thèse en cours (R. Oubellil qui est en collaboration avec l'ISIR Paris)
Projets : MSTIC 2012 (UJF) et partenariat dans ANR CONFOC-AO (2011-2014)
Publications : 20 articles conférences internationales, 5 revues internationales, 5 chapitres ouvrages collectifs, édition d'1 ouvrage collectif.
NANO (Plates-formes)